
Intelligent Sensing, Communication and Computing for Collaborative Task Assignment on Heterogeneous Autonomous Systems
– Saeid Anwar
- Overview –
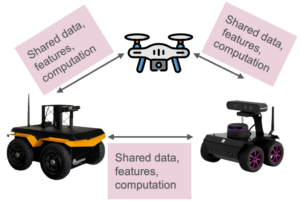
The goal is to design a testbed comprising unmanned ground vehicles (UGV) and unmanned ariel vehicles (UAV) that posits a self-adaptive optimization framework that is capable of navigating the workload of multiple tasks (storage, processing, computation, transmission, inference) collaboratively on multiple heterogenous nodes for multiple tasks simultaneously. The self-adaptive optimization framework involves compressing and masking the input image frames, identifying similar frames, and profiling the devices for various tasks to obtain the boundary conditions for the optimization framework.
- Significance –
The importance of this project lies in its potential to significantly improve the efficiency and adaptability of autonomous systems operating in real-time environments. The research addresses critical challenges in optimizing resource allocation across heterogeneous devices by creating a testbed that integrates UAVs and UGVs for collaborative task management. The intelligent sensing and self-adaptive optimization framework developed within this project has broad applications, from military operations to smart cities and disaster management, enabling more precise and effective task execution across multiple platforms. This work can drive advancements in surveillance, reconnaissance, and public safety, allowing systems to handle complex workloads while adapting dynamically to environmental changes.
- Obstacles –
However, the challenges in achieving this are equally significant. Handling the complexity of real-time data processing across multiple autonomous systems involves not only optimizing tasks like storage, processing, computation, and transmission but also ensuring that these tasks are distributed in a way that respects the varying capacities of the devices involved. The diverse mobility and resource constraints of UAVs and UGVs introduce additional difficulties in maintaining performance, especially when operating under time-critical or resource-limited conditions.

Edge-Optimized AI for Off-Grid Wildlife Monitoring
– Bipendra Basnyat
- Research Objectives –
The research objectives for edge-optimized AI in off-grid wildlife monitoring focus on developing advanced technologies for efficient and non-invasive wildlife observation in remote areas. Key areas of focus include hardware optimization for energy efficiency and durability in harsh environments, and AI model optimization for effective operation on resource-constrained devices. The objectives also emphasize the development of edge intelligence capabilities, enabling on-device decision making and adaptive sensing to maximize the utility of collected data while minimizing energy consumption.
Additionally, the research aims to address challenges in communication and data management, particularly in areas with limited connectivity, by developing low-power wireless protocols and efficient data compression techniques. Ethical and environmental considerations form a crucial component of the objectives, ensuring that the deployment of these technologies minimizes disturbance to wildlife and ecosystems. This includes investigating the impact of monitoring devices on animal behavior, implementing privacy-preserving measures, and developing sustainable deployment and retrieval strategies to mitigate environmental impact
- Research Contributions-
- Self-sustaining, ultra-low-power edge computing platform with integrated renewable energy harvesting for long-term wildlife monitoring
- Adaptive, power-aware AI models for efficient wildlife detection and classification on resource-constrained devices
- Distributed, self-organizing sensor network with collaborative data processing and adaptive duty cycling for optimal energy usage
- Energy-efficient, long-range wireless communication protocol with delay-tolerant networking for robust data transmission in wildlife monitoring networks
- Minimally invasive deployment strategies with intelligent power management and quantified impact assessments on wildlife behavior